

THIRD 2024
(2612) Scrappy

Description
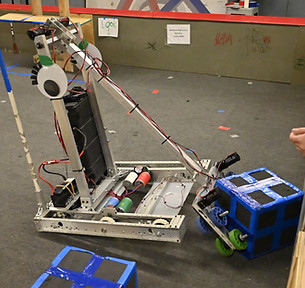
Scrappy was built from a developmental Doug chassis. Affixed was a two-stage elevator made with 3D printed bearings with an affinity for snapping mid-match. Couple that with malfunctioning SPARKs that caused the robot to brown out after roughly 30 seconds, we're not sure how it won THIRD 2024.
Quick Facts
Status
Barely Functional
Drive
4-CIM Tank
Intake
Chain driven with compliant wheels
Electrical
30-second run time
FRC 2025
SIR DOUGLAS IV
Quick Facts
Status
Fully Functional
Description
Sir Douglas IV is the fourth iteration of the Doug franchise. Sporting large googly eyes, a robust climber with automated levels, cameras for human vision, and lime lights for computer vision, it was a strong competitor in 2025. Douglas dazzled daringly through drenched duels to win Finalist at Kettering University, and Team Spirit at Macomb.

Drive
4-NEO Swerve with NEO 550s
Intake
Elevator
2 designs using NEOs and IR sensors
Automated with 4 levels
THIRD 2024
(3098) Ellie
Description
Nicknamed Sherlock because "It was a mystery if it would work", Ellie's development was a little strained. This robot was finished the day of competition, and showed the most promise with advanced features like an extending arm and functional electronics. These features were good enough to net Ellie a second place in THIRD 2024. Out of two robots.
Quick Facts
Status
Fully Functional
Drive
4-CIM Tank
Arm
Rotating and extendable
Claw
Strong enough to lift a robot
FRC 2024
Doug³
Quick Facts
Status
Mostly Functional
Drive
8-NEO Swerve
Intake
Climber
Rotating dual-roller design
73% reliability
Description
Doug³ is the 3rd descendant of 3098's FRC bots, all with the surname of Doug. Used in the 2024 FRC season Crescendo. Will this robot, like its predecessors, dazzle and cheer its way to victory?

OCCRA 2023

Inspired by our FRC 2022 robot, Wilbert raced around the field with vigor, winning the Beautiful Bot Award with its amazing bug eyes, and its cargo-devouring teeth.
Motor-driven roller with tubing
Intake
4-CIM Tank with Rear Omnis
Drive
Description
Reused
Status
Quick Facts
Wilbert
Features
Modular shooter assembly
FRC 2023
Doug Too
Quick Facts
Description
Status
Mostly Functional
Drive
6-Mini-CIM Tank with Rear Omnis
Intake
Air-powered
Pneumatics
6-tank system powering claw
Doug Too was used for the 2023 FRC game, CHARGED UP. Yes, the man himself is back, and he's better than ever.. Watch out, for he will rise to the top!
Doug Too sports googly eyes, a pneumatically actuated claw, and a modified Climber-in-a-Box to extend the arm.

OCCRA 2022
Harold
Description
Quick Facts
4-CIM Tank
Drive
Reused
Status
Reliability
Intake
2-match average
Harold was used for the 2022 OCCRA game, High Rise. Featuring a 2 stage elevator system, a severe rapid unscheduled disassembly problem (dropping its claw mid-match) and an attitude, sporting 6 inch googly eyes. Harold quickly became one of the most loved robots at its second competition.
Twin horizontal rollers
Folded origami, now tin cans
Chassis

FRC 2022
Doug
Quick Facts
Description
6-CIM Tank with Rear Omnis
Drive
Mostly Functional
Status
Features
Intake
22-foot shooting distance
Doug was the robot we used for the 2022 FRC season. The man, the myth, the legend, Doug was a machine... quite literally. Doug could accurately shoot from 22ft away into the high goal. Just remember, stay away from the auton, or else...
Drop-down floor pickup

OCCRA 2021
R.O.B Zippy

Description
Rob Zippy was our robot for the 2021 OCCRA season, Soccer Shootout. Due to this robot and a certain teammate's very aggressive defensive driving, we reached the semifinals in the finals. This is proof something held together by zip ties can succeed.
Quick Facts
Status
Recycled
Drive
4-CIM Tank
Pneumatics
Powered arm movement
Features
Zip Ties
FRC 2020-21
EWOK
Quick Facts
Description
Status
Drive
Intake
Features
Recycled
6-CIM Tank with Outside Omnis
Drop-down floor pickup
Hooks for climbing
This season was a different one because of the real life challenges that affected it. The competitions were all online, with the goal for our robot to be able to drive through a small obstacle course following a certain pattern. We also had to design our very own game and present it to FIRST. The challenges faced this year were very different, but we overcame them.
